var x, y int
go func() {
x = 1 // A1
fmt.Print("y:", y, " ") // A2
}()
go func() {
y = 1 // B1
fmt.Print("x:", x, " ") // B2
}()y:0 x:1
x:0 y:1
x:1 y:1
y:1 x:1x:0 y:0
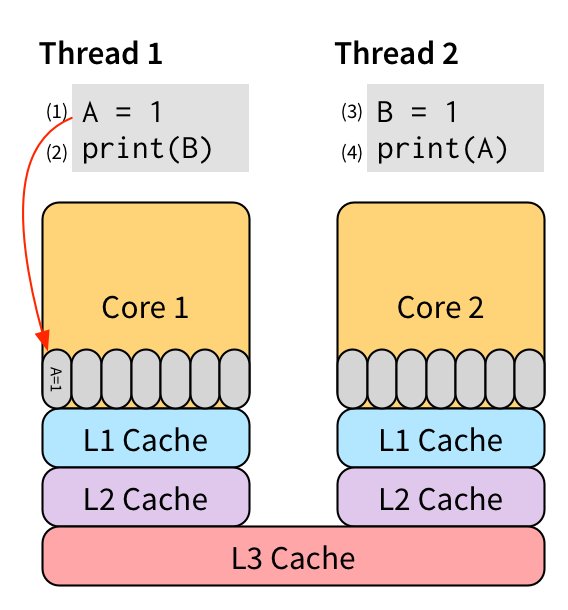
y:0 x:0这种令人意外的结果被称为内存重排: Memory Reordering
为什么会发生内存重排
编译器重排
X = 0
for i in range(100):
X = 1
print XX = 1
for i in range(100):
print X如果这时候,假设有 Processor 2 同时在执行一条指令:
X = 0P2 中的指令和 snippet 1 交错执行时,可能产生的结果是:111101111..
P2 中的指令和 snippet 2 交错执行时,可能产生的结果是:11100000…
有人说这个例子不够有说服力,我们看看参考资料中的另一个例子:
int a, b;
int foo()
{
a = b + 1;
b = 0;
return 1;
}输出汇编:
mov eax, DWORD PTR b[rip]
add eax, 1
mov DWORD PTR a[rip], eax // --> store to a
mov DWORD PTR b[rip], 0 // --> store to b开启 O2 优化后,输出汇编:
mov eax, DWORD PTR b[rip]
mov DWORD PTR b[rip], 0 // --> store to b
add eax, 1
mov DWORD PTR a[rip], eax // --> store to a给 a 和 b 的赋值顺序被修改了,可见 compiler 也是可能会修改赋值的顺序的。
|
在多核心场景下,没有办法轻易地判断两段程序是“等价”的。 |
CPU 重排
litmus 验证
cat sb.litmus
X86 SB
{ x=0; y=0; }
P0 | P1 ;
MOV [x],$1 | MOV [y],$1 ;
MOV EAX,[y] | MOV EAX,[x] ;
locations [x;y;]
exists (0:EAX=0 /\ 1:EAX=0)⇒
~ ❯❯❯ bin/litmus7 ./sb.litmus
%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Results for ./sb.litmus %
%%%%%%%%%%%%%%%%%%%%%%%%%%%
X86 SB
{x=0; y=0;}
P0 | P1 ;
MOV [x],$1 | MOV [y],$1 ;
MOV EAX,[y] | MOV EAX,[x] ;
locations [x; y;]
exists (0:EAX=0 /\ 1:EAX=0)
Generated assembler
##START _litmus_P0
movl $1, -4(%rbx,%rcx,4)
movl -4(%rsi,%rcx,4), %eax
##START _litmus_P1
movl $1, -4(%rsi,%rcx,4)
movl -4(%rbx,%rcx,4), %eax
Test SB Allowed
Histogram (4 states)
96 *>0:EAX=0; 1:EAX=0; x=1; y=1;
499878:>0:EAX=1; 1:EAX=0; x=1; y=1;
499862:>0:EAX=0; 1:EAX=1; x=1; y=1;
164 :>0:EAX=1; 1:EAX=1; x=1; y=1;
Ok
Witnesses
Positive: 96, Negative: 999904
Condition exists (0:EAX=0 /\ 1:EAX=0) is validated
Hash=2d53e83cd627ba17ab11c875525e078b
Observation SB Sometimes 96 999904
Time SB 0.11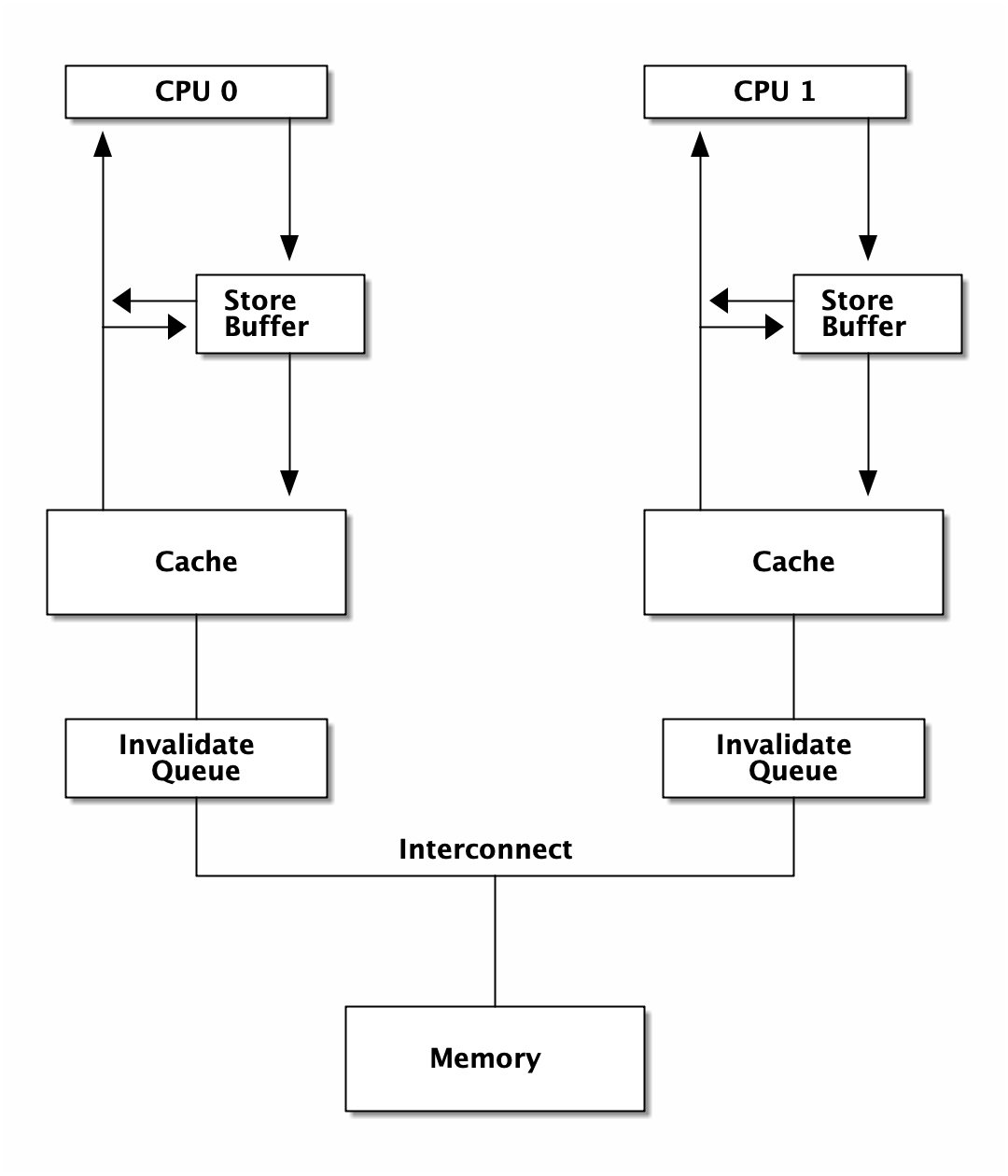
当我们需要顺序的时候,我们在讨论些什么
memory barrier
A memory barrier, also known as a membar, memory fence or fence instruction, is a type of barrier instruction that causes a central processing unit (CPU) or compiler to enforce an ordering constraint on memory operations issued before and after the barrier instruction.
有了 memory barrier,才能实现应用层的各种同步原语。如 atomic,而 atomic 又是各种更上层 lock 的基础。
atomic
On x86, it will turn into a lock prefixed assembly instruction, like LOCK XADD. Being a single instruction, it is non-interruptible. As an added "feature", the lock prefix results in a full memory barrier
"…locked operations serialize all outstanding load and store operations (that is, wait for them to complete)." …"Locked operations are atomic with respect to all other memory operations and all externally visible events. Only instruction fetch and page table accesses can pass locked instructions. Locked instructions can be used to synchronize data written by one processor and read by another processor." -
Chapter 8.1.2.
lock
概念和用法就不讲了,你们应该都用过。没有免费的午餐,有锁冲突就会大幅度降低性能。
为了减小对性能的影响,锁应尽量减小粒度,并且不在互斥区内放入耗时操作,但是总是有一些悲伤的故事:
sync.Pool 中的锁
var (
allPoolsMu Mutex
allPools []*Pool
)
func (p *Pool) pinSlow() *poolLocal {
allPoolsMu.Lock()
defer allPoolsMu.Unlock()
pid := runtime_procPin()
if p.local == nil {
allPools = append(allPools, p)
}
//........
return &local[pid]
}udp WriteTo 的锁
func (fd *FD) WriteTo(p []byte, sa syscall.Sockaddr) (int, error) {
if err := fd.writeLock(); err != nil {
return 0, err
}
defer fd.writeUnlock()
if err := fd.pd.prepareWrite(fd.isFile); err != nil {
return 0, err
}
for {
err := syscall.Sendto(fd.Sysfd, p, 0, sa)
if err == syscall.EAGAIN && fd.pd.pollable() {
if err = fd.pd.waitWrite(fd.isFile); err == nil {
continue
}
}
if err != nil {
return 0, err
}
return len(p), nil
}
}tcp transport 上也有锁!
type Transport struct {
idleMu sync.Mutex
wantIdle bool // user has requested to close all idle conns
idleConn map[connectMethodKey][]*persistConn // most recently used at end
idleConnCh map[connectMethodKey]chan *persistConn
idleLRU connLRU
reqMu sync.Mutex
reqCanceler map[*Request]func(error)
altMu sync.Mutex // guards changing altProto only
altProto atomic.Value // of nil or map[string]RoundTripper, key is URI scheme
connCountMu sync.Mutex
connPerHostCount map[connectMethodKey]int
connPerHostAvailable map[connectMethodKey]chan struct{}
//......会不会碰上瓶颈要随缘。
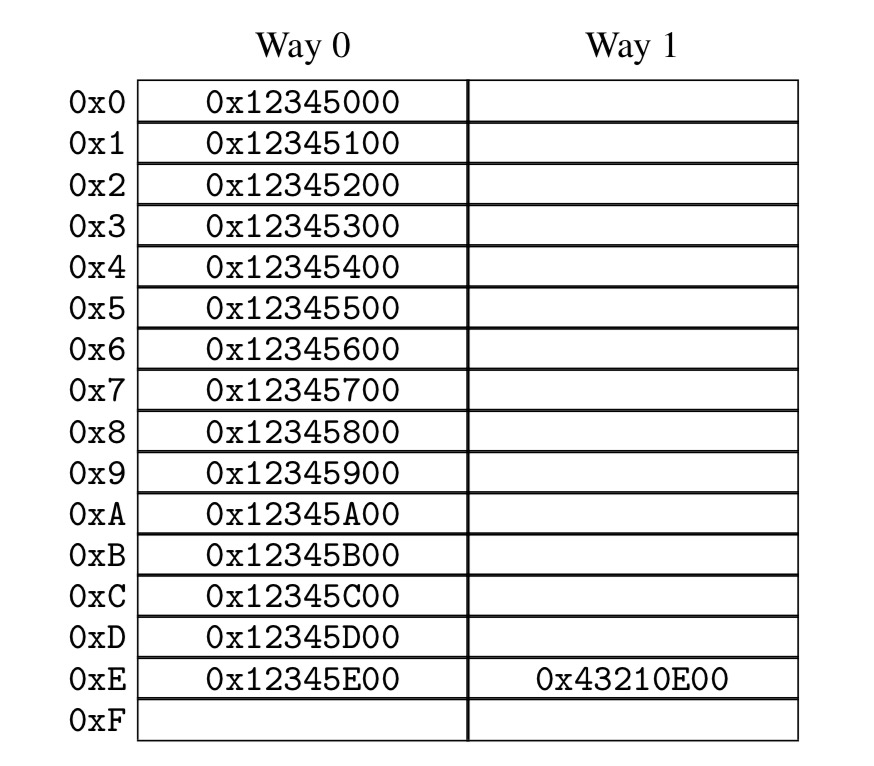
cache contention
cache contention 那也是 contention,使用 atomic,或者 false sharing 就会导致 cache contention。
atomic 操作可以理解成 “true sharing”。
症状:在核心数增多时,单次操作的成本上升,导致程序整体性能下降。
true sharing
例子:
RWMutex 的 RLock:
func (rw *RWMutex) RLock() {
// ....
if atomic.AddInt32(&rw.readerCount, 1) < 0 {
// A writer is pending, wait for it.
runtime_SemacquireMutex(&rw.readerSem, false)
}
// else 获取 RLock 成功
// ....
}true sharing 带来的问题:
sync: RWMutex scales poorly with CPU count
至今还没有解决这个问题,如果解决了的话,根本不需要 sync.Map 出现了。
false sharing
var semtable [semTabSize]struct {
root semaRoot
pad [cpu.CacheLinePadSize - unsafe.Sizeof(semaRoot{})]byte
}var timers [timersLen]struct {
timersBucket
// The padding should eliminate false sharing
// between timersBucket values.
pad [cpu.CacheLinePadSize - unsafe.Sizeof(timersBucket{})%cpu.CacheLinePadSize]byte
}本来每个核心(在 Go 里的 GPM 中的 P 概念)独享的数据,如果发生 false sharing 了会怎么样?
思考题:
二维数组求和,横着遍历和竖着遍历哪种更快,为什么?
为什么 Go 官方坚持不在 sync.Map 上增加 Len 方法?